julia-robotics-paper-code
所属分类:机器人/智能制造
开发工具:Jupyter Notebook
文件大小:4150KB
下载次数:0
上传日期:2019-05-22 19:47:54
上 传 者:
sh-1993
说明: 与论文“Julia for Robotics:高级编程语言中的仿真和实时控制”相关的代码...
(Code associated with the paper "Julia for Robotics: Simulation and Real-time Control in a High-level Programming Language")
文件列表:
atlas_walking.png (116747, 2019-05-23)
benchmarks (0, 2019-05-23)
benchmarks\controller (0, 2019-05-23)
benchmarks\controller\Controller dt histogram.ipynb (93998, 2019-05-23)
benchmarks\controller\Manifest.toml (26205, 2019-05-23)
benchmarks\controller\Project.toml (322, 2019-05-23)
benchmarks\controller\run.sh (477, 2019-05-23)
benchmarks\controller\run_lcm_timing.sh (558, 2019-05-23)
benchmarks\dynamics (0, 2019-05-23)
benchmarks\dynamics\RigidBodyDynamics.jl (0, 2019-05-23)
benchmarks\dynamics\RigidBodyDynamics.jl\Manifest.toml (4896, 2019-05-23)
benchmarks\dynamics\RigidBodyDynamics.jl\Project.toml (177, 2019-05-23)
benchmarks\dynamics\RigidBodyDynamics.jl\run.sh (160, 2019-05-23)
benchmarks\dynamics\RigidBodyDynamics.jl\runbenchmarks.jl (3026, 2019-05-23)
benchmarks\dynamics\atlas.urdf (63713, 2019-05-23)
benchmarks\dynamics\rbdl (0, 2019-05-23)
benchmarks\dynamics\rbdl\benchmarks (0, 2019-05-23)
benchmarks\dynamics\rbdl\benchmarks\CMakeLists.txt (681, 2019-05-23)
benchmarks\dynamics\rbdl\benchmarks\FindEigen3.cmake (2994, 2019-05-23)
benchmarks\dynamics\rbdl\benchmarks\FindRBDL.cmake (3038, 2019-05-23)
benchmarks\dynamics\rbdl\benchmarks\benchmarks.cc (1082, 2019-05-23)
benchmarks\dynamics\rbdl\dynamics.cc (1081, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a (0, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a\.editorconfig (118, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a\.hg_archival.txt (174, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a\.hgignore (463, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a\.hgtags (1104, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a\CMake (0, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a\CMake\FindCython.cmake (1435, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a\CMake\FindEigen3.cmake (2994, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a\CMake\FindUnitTest++.cmake (1031, 2019-05-23)
benchmarks\dynamics\rbdl\rbdl-rbdl-0879ee8c548a\CMake\ReplicatePythonSourceTree.cmake (177, 2019-05-23)
... ...
## Julia for Robotics: Simulation and Real-time Control in a High-level Programming Language
This repository contains code associated with the paper "Julia for Robotics: Simulation and Real-time Control in a High-level Programming Language", submitted to ICRA 2019.
### Video
The video associated with the paper can be found [here](https://player.vimeo.com/video/320***7370).
### Packages
Main packages discussed in the paper:
* [RigidBodyDynamics.jl](https://github.com/JuliaRobotics/RigidBodyDynamics.jl): rigid body dynamics library.
* [MeshCat.jl](https://github.com/rdeits/MeshCat.jl): 3D visualizer.
* [RigidBodySim.jl](https://github.com/JuliaRobotics/RigidBodySim.jl): a simulation environment.
* [Parametron.jl](https://github.com/tkoolen/Parametron.jl): optimization framework.
* [QPControl.jl](https://github.com/tkoolen/QPControl.jl): QP-based low-level control algorithms.
Additional relevant packages:
* [StrandBeestRobot.jl](https://github.com/rdeits/StrandbeestRobot.jl): simulation of a strandbeest-like mechanism, used to create Fig. 3.
* [LCMCore.jl](https://github.com/JuliaRobotics/LCMCore.jl): bindings to the LCM (Lightweight Communications and Marshalling) message passing library.
* [QPWalkingControl.jl](https://github.com/tkoolen/QPWalkingControl.jl): a walking controller for Atlas based on QPControl.jl (under development).
### Setup
To run benchmarks and notebooks locally, simply clone the package and follow the instructions below.
### Benchmarks
* [benchmarks/dynamics](https://github.com/tkoolen/julia-robotics-paper-code/tree/master/benchmarks/dynamics): code used to benchmark RigidBodyDynamics.jl and RBDL (Table I).
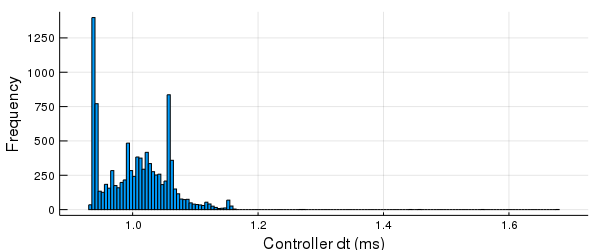
* [benchmarks/controller](https://github.com/tkoolen/julia-robotics-paper-code/tree/master/benchmarks/controller): controller benchmark code (used to create Fig. 6).
Please see the associated `README.md` for information on how to run these benchmarks.
The figure below shows an additional quick benchmark result for the standing controller that does *not* include network communication using LCMCore.jl, as opposed to the figure in the paper. There is one sample at 1.67 ms.
### Notebooks
The [`notebooks`](https://github.com/tkoolen/julia-robotics-paper-code/tree/master/notebooks) directory contains the Jupyter notebook used to generate Fig. 4.
Most of the packages listed above also have a `notebooks` directory with usage examples.
近期下载者:
相关文件:
收藏者: