RobotNavigation-master
所属分类:matlab编程
开发工具:matlab
文件大小:281KB
下载次数:1
上传日期:2021-04-06 14:45:48
上 传 者:
菜鸟11111Zzz
说明: 运行应用程序需要MATLAB。
安装
所要做的就是将文件复制到本地驱动器上的文件夹中,并使用“SetPath”菜单将该文件夹包含到MATLAB的路径中。
执行
应用程序必须在MATLAB环境下执行。
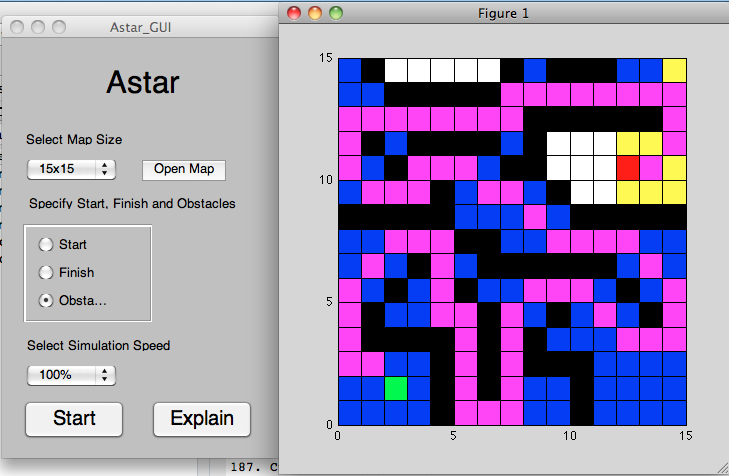
A-star算法:在MATLAB的命令行中键入“Astar\u GUI”
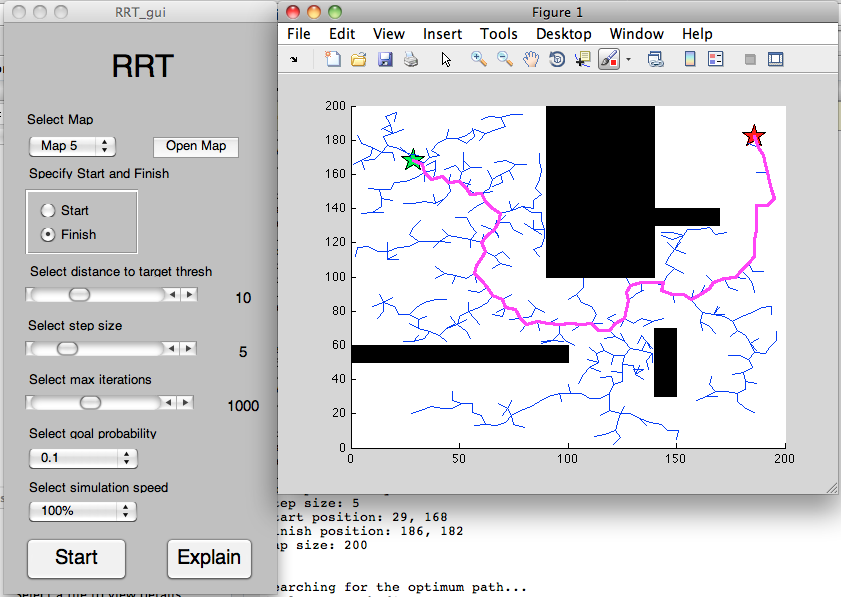
RRT算法:在MATLAB的命令行中输入“RRT\u gui”
在这两种情况下,图形用户界面都将打开,在这里可以选择地图、设置参数和运行算法。按“解释”按钮了解更多信息。
(To run the application MATLAB is needed.
Installation
All that has to be done is to copy files to the folder on local drive and include that folder into MATLAB's path by using "SetPath" menu.
Execution
Application has to be executed from MATLAB environment.
A-star algorithm: type in "Astar_GUI" in MATLAB's command line
RRT algorithm: type in "RRT_gui" in MATLAB's command line
In both cases, graphical user interface will open, where maps can be selected, parameters set and algorithms ran. Press "Explain" button for more information.)
文件列表:
Astar (0, 2012-11-03)
Astar\Astar.m (15705, 2012-11-03)
Astar\Astar_GUI.fig (3358, 2012-11-03)
Astar\Astar_GUI.m (26402, 2012-11-03)
Astar\Astar_help.pdf (99596, 2012-11-03)
Astar\nav_createMap.m (1027, 2012-11-03)
Astar\nav_drawCurrPos.m (226, 2012-11-03)
Images (0, 2012-11-03)
Images\Astar.png (42393, 2012-11-03)
Images\RRT.png (84291, 2012-11-03)
RRT (0, 2012-11-03)
RRT\RRTPlan.m (6685, 2012-11-03)
RRT\RRT_createMap.m (2731, 2012-11-03)
RRT\RRT_gui.fig (4540, 2012-11-03)
RRT\RRT_gui.m (18703, 2012-11-03)
RRT\RRT_help.pdf (94239, 2012-11-03)
Robot Navigation Algorithms
===============
A project completed for a class during my undergraduate studies to implement two different
types of navigation algorithms with visualisation. The goal was to use the visualisation to
be able to explain given algorithms to first year students during lectures while demonstrating
them in real time.
## Usage
Both algorithms are implemented in MATLAB. Simply add the directory to MATLAB's path or set it
as the current directory and run the following:
* A-star: Astar_GUI
* RRT: RRT_gui
More detailed instructions can be found under "Explain" button on the GUI of each algorithm.
## A-star
One of the main algorithms falling into the Best-first Graph Search category. It is a relatively
simple algorithm, which knows the exact location of the robot and target coordinates that it is
trying to reach. At each step, surrounding area is analysed to see if it is suitable for
driving - no obstacle is present there. If so, a score for each possible step is calculated,
which consists of distance from the current position to the new one and distance from new position
to the goal. Calculation does not take into consideration any obstructions on the way, it analyses
straight line distance. Next step is made by going to the position, which has the lowest score,
thus is closest to the goal.
Using this type of search the first time in the environment might be a bit inefficient as the
robot can wonder around until the correct path is found, but once the goal is reached it always
knows the fastest route as long as obstacles do not change. In addition, for real world environment,
costs can be adjusted according to surface. For example, driving on bumpy grass will be slower than
on smooth tarmac, so grass spot would have higher cost, because in some cases it is quicker to take
a bit longer route, but on better surface. Also, some robots might want to avoid sand if there is
any alternative path, because it can dig in wheels getting it stuck.
## Real-Time Randomized Path Planning (RRT)
RRT is a probabilistic based search algorithm. In some cases, using random choices can be very efficient.
This idea was incorporated in probabilistic based search algorithms like Real-Time Randomised Path
Planning (RRT) method. It is also using heuristics to move towards the goal, but that happens only
every 10th of a step or so. Other times it just simply goes random direction, building up tree-like
structure. This type of algorithms are based on the idea, that often there are many obstacles between
starting point and the goal and much time can be wasted by trying to go straight towards the target
and hitting dead ends. Instead, larger area around is being searched, thus alternative path can be
quickly found. Main advantages of RRT are: uniformly distributed search - it covers all area, always
moves towards the goal (not necessarily every step) and the simplicity of it provides high execution speed.
近期下载者:
相关文件:
收藏者: