MATLABRobotics-master
所属分类:matlab编程
开发工具:matlab
文件大小:49KB
下载次数:0
上传日期:2021-04-28 14:44:28
上 传 者:
52梦想
说明: 用于移动机器人导航的MATLAB示例代码。
(Matlab example code for mobile robot navigation.)
文件列表:
Clustering (0, 2018-11-11)
Clustering\k-means (0, 2018-11-11)
Clustering\k-means\kmeansSample.m (2406, 2018-11-11)
CommonTools (0, 2018-11-11)
CommonTools\StaticsToolbox (0, 2018-11-11)
CommonTools\StaticsToolbox\normcdf.m (446, 2018-11-11)
CommonTools\StaticsToolbox\normpdf.m (388, 2018-11-11)
Localization (0, 2018-11-11)
Localization\ExtenedKalmanFilterLocalization (0, 2018-11-11)
Localization\ExtenedKalmanFilterLocalization\ExtendedKalmanFilterLocalization.m (5338, 2018-11-11)
Localization\ParticleFilterLocalization (0, 2018-11-11)
Localization\ParticleFilterLocalization\ParticleFilterLocalization.m (5701, 2018-11-11)
Localization\UnscentedKalmanFilterLocalization (0, 2018-11-11)
Localization\UnscentedKalmanFilterLocalization\UnscentedKalmanFilterLocalization.m (6214, 2018-11-11)
MachineLearning (0, 2018-11-11)
MachineLearning\ConjugateGradientMethod (0, 2018-11-11)
MachineLearning\ConjugateGradientMethod\ConjugateGradientMethod.m (3579, 2018-11-11)
MachineLearning\EMAlgorithm (0, 2018-11-11)
MachineLearning\EMAlgorithm\EMAlgorithmSample.m (2779, 2018-11-11)
MachineLearning\GoldenSectionMethod (0, 2018-11-11)
MachineLearning\GoldenSectionMethod\GoldenSectionMethod.m (1477, 2018-11-11)
MachineLearning\NelderMeadMethod (0, 2018-11-11)
MachineLearning\NelderMeadMethod\NelderMead.m (3371, 2018-11-11)
MachineLearning\NewtonMethod (0, 2018-11-11)
MachineLearning\NewtonMethod\NewtonMethod.m (2515, 2018-11-11)
MachineLearning\SteepestDescentMethod (0, 2018-11-11)
MachineLearning\SteepestDescentMethod\SteepestDescentMethod.m (2373, 2018-11-11)
Mapping (0, 2018-11-11)
Mapping\GridMapSample (0, 2018-11-11)
Mapping\GridMapSample\GridMapSample.m (6486, 2018-11-11)
PathPlanning (0, 2018-11-11)
PathPlanning\AStar (0, 2018-11-11)
PathPlanning\AStar\AStarSamle.m (6958, 2018-11-11)
PathPlanning\CompleteCoveragePathPlanning (0, 2018-11-11)
PathPlanning\CompleteCoveragePathPlanning\CompleteCoveragePathPlanning.asv (5918, 2018-11-11)
PathPlanning\CompleteCoveragePathPlanning\CompleteCoveragePathPlanning.m (6824, 2018-11-11)
PathPlanning\Dijkstra (0, 2018-11-11)
PathPlanning\Dijkstra\DijkstraSample.m (10664, 2018-11-11)
PathPlanning\DynamicWindowApproach (0, 2018-11-11)
... ...
MATLABRobotics
==============
MATLAB sample codes for mobile robot navigation.
=== I'm sorry this project is no longer active. ===
If you are interested in robotics algorithms, this project might help you:
- [AtsushiSakai/PythonRobotics: Python sample codes for robotics algorithms\.](https://github.com/AtsushiSakai/PythonRobotics)
# Localization
Sample codes for localization.
## ExtenedKalmanFilterLocalization
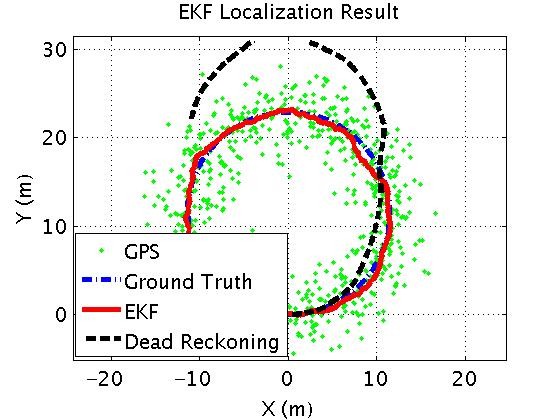
A sample code of localization with Extended Kalman Filter
Documents in Japanease:
拡張カルマンフィルタを使用した自己位置推定MATLABサンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20130413/1365826157
## UnscentedKalmanFilterLocalization
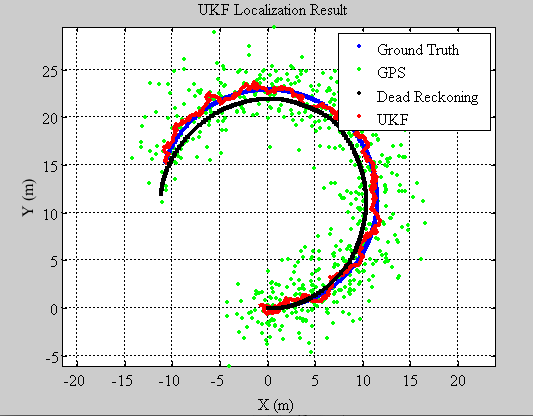
A sample code of localization with Unscented Kalman Filter (Sigma points Kalman Filter)
Documents in Japanease:
Unscentedカルマンフィルタを使用した自己位置推定MATLABサンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140614/1402731732
## ParticleFilterLocalization

A sample code of localization with Particle Filter
Documents in Japanease:
Particle Filterを使用した自己位置推定MATLABサンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140628/1403956852
# Mapping
Sample codes for mapping.
# GridMapSample
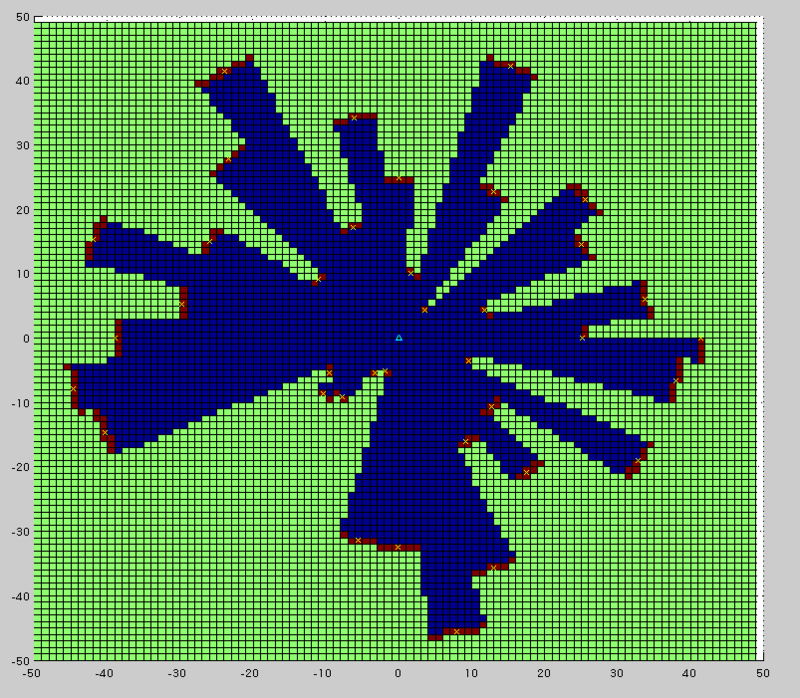
A sample code for mapping with grid map
Documents in Japanease:
自律移動ロホットのためのクリットマッフ作成MATLABサンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140714/1405343128
# PathPlanning
Sample codes for path planning
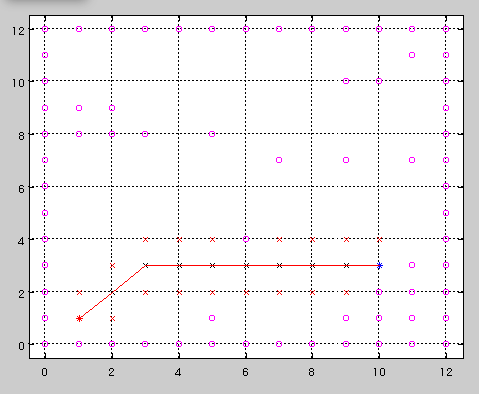
## Dijkstra
A sample code for path planning with Dijkstra method.
It can generate a vector field to goal with dynamic proggramming.
Documents in Japanease:
タイクストラ法による最短経路探索MATLABフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140502/1399001915
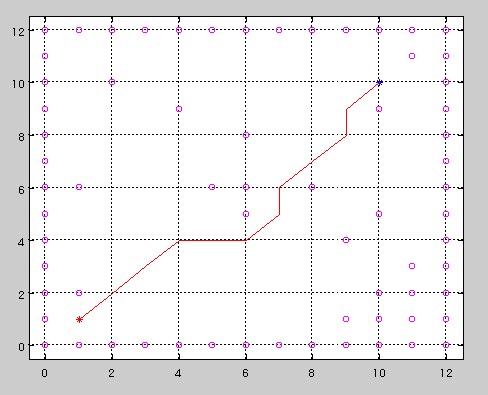
## AStar
A sample code for path planning with A star.
Documents in Japanease:
A*による最短経路探索MATLABフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140503/1399080847
## PathSmoothing
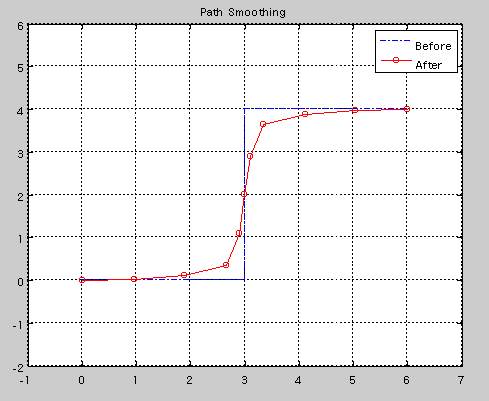
A sample code for path smoothing with gradient method
Documents in Japanease:
MATLABよる経路平滑化(Path Smoothing)フロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140510/1399694663
## Dynamic Window Approach
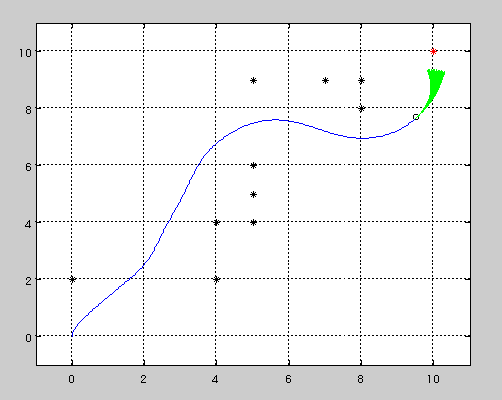
A sample code for local path planning with dyamic window approach.
Documents in Japanease:
Dynamic Window ApproachのMATLAB サンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140624/1403618922
# SLAM
Sample codes of Simultaneous Localization And Mapping(SLAM)
## ICP
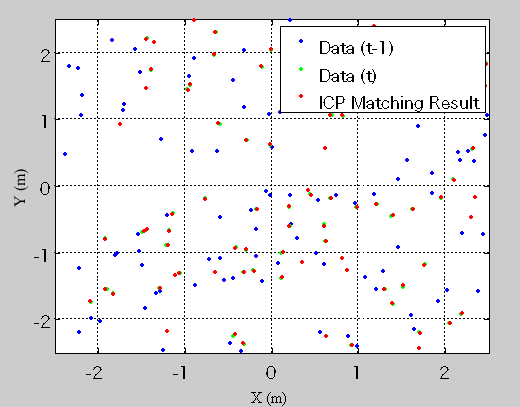
A sample code for relative movement estimation with Iterative closest point (ICP) algorithm.
Documents in Japanease:
ICPアルコリスムを利用したSLAM用MATLABサンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140617/1402971928
## EKF SLAM
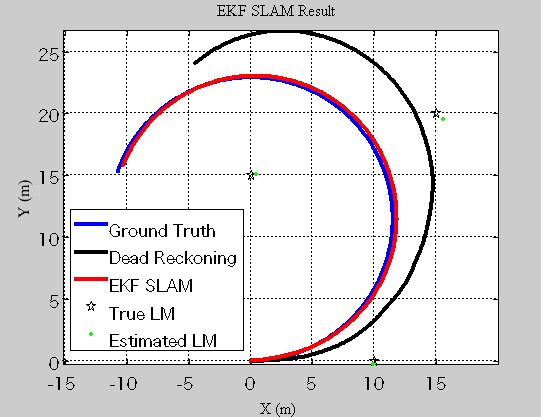
A sample code for EKF SLAM based on feature points.
Documents in Japanease:
EKFによるSLAMのためのMATLABサンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140720
# Machine Learning
Sample codes for machine learning and pattern recognition.
## EM Algorithm
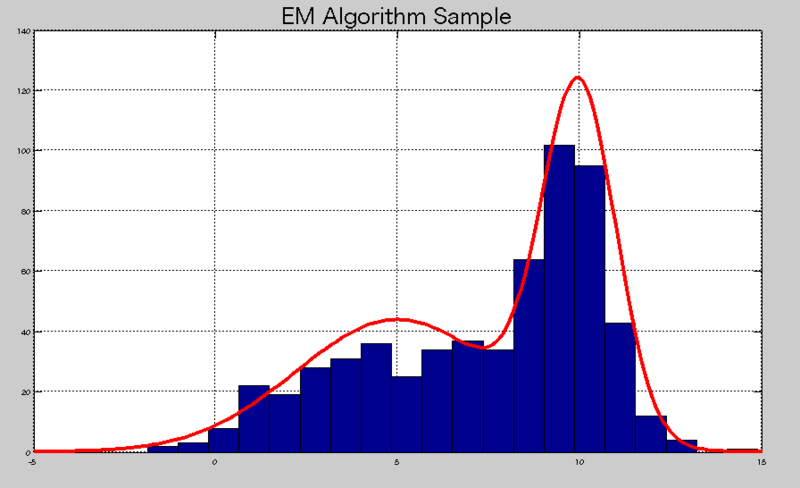
A sample code for parameter learning on mixture gaussian model with EM algorithm
Documents in Japanease:
EMアルコリスムによる確率分布学習のMATLABフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20140710/1404997476
## Nelder Mead

A sample code for nonlinear optimization with Nelder-mead algorithm.
Documents in Japanease:
Nelder-Mead法(シンフレックス法)による非線形最適化MATLABサンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20141217/1418824777
## Steepest Descent Method
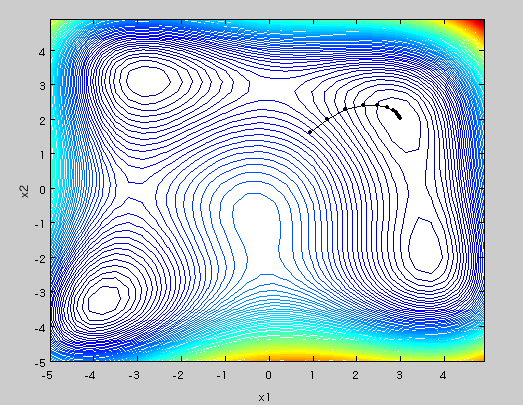
A sample code for nonlinear optimization with steepest descent method.
Documents in Japanease:
最急降下法による非線形最適化MATLABサンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20141221/1419163905
## Conjugate Gradient Method
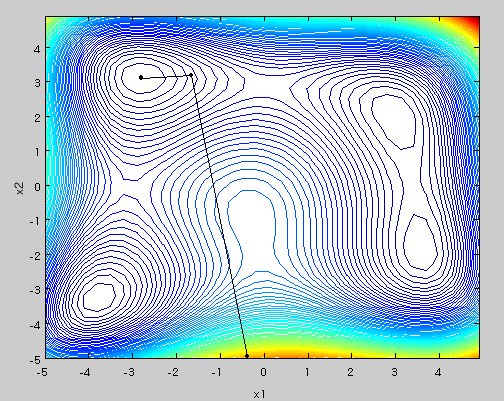
A sample code for nonlinear optimization with conjugate gradient method.
Documents in Japanease:
共役勾配法による非線形最適化MATLABサンフルフロクラム - MY ENIGMA http://d.hatena.ne.jp/meison_amsl/20141225/1419481084
# License
MIT
# Author
Atsushi Sakai ([@Atsushi_twi](https://twitter.com/Atsushi_twi))
近期下载者:
相关文件:
收藏者: