uOCF-code
说明: [arXiv]论文“以对象为中心的神经场的无监督发现”的官方代码实现
([arXiv] The official code implementation of the paper "Unsupervised Discovery of Object-Centric Neural Fields")
([arXiv] The official code implementation of the paper "Unsupervised Discovery of Object-Centric Neural Fields")
文件列表:
data/
models/
options/
scripts/
util/
environment.yml
test.py
train.py
models/
options/
scripts/
util/
environment.yml
test.py
train.py
Unsupervised Discovery of Object-Centric Neural Fields
arXiv 2024


---
This is the official repository of the paper **Unsupervised Discovery of Object-Centric Neural Fields**.
**Authors:** Rundong Luo* , Hong-Xing "Koven" Yu*, Jiajun Wu from Stanford University
For more results, please visit our [project website](https://red-fairy.github.io/uOCF/).
## Abstract
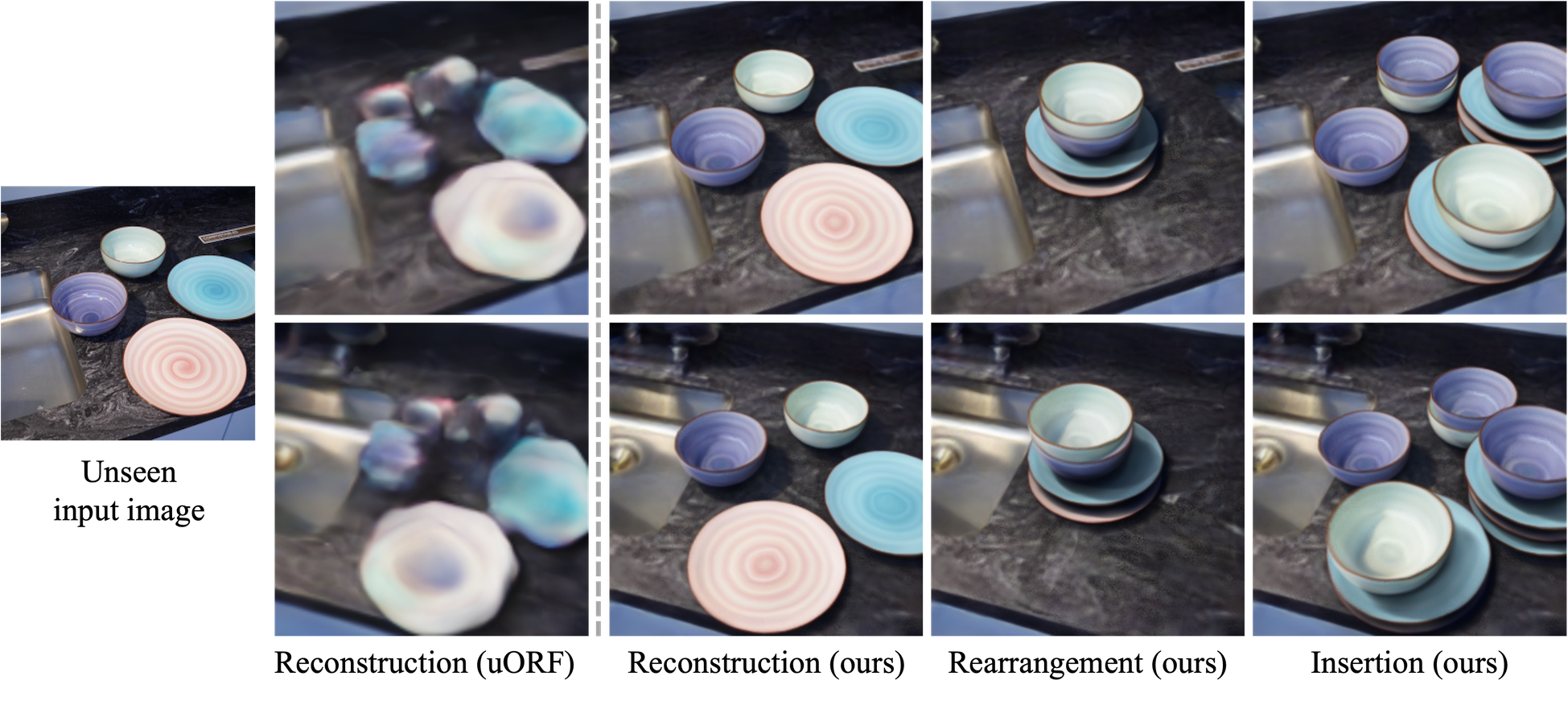
We study inferring 3D object-centric scene representations from a single image. While recent methods have shown potential in unsupervised 3D object discovery from simple synthetic images, they fail to generalize to real-world scenes with visually rich and diverse objects. This limitation stems from their object representations, which entangle objects' intrinsic attributes like shape and appearance with extrinsic, viewer-centric properties such as their 3D location. To address this bottleneck, we propose Unsupervised discovery of Object-Centric neural Fields (uOCF). uOCF focuses on learning the intrinsics of objects and models the extrinsics separately. Our approach significantly improves systematic generalization, thus enabling unsupervised learning of high-fidelity object-centric scene representations from sparse real-world images. To evaluate our approach, we collect three new datasets, including two real kitchen environments. Extensive experiments show that uOCF enables unsupervised discovery of visually rich objects from a single real image, allowing applications such as 3D object segmentation and scene manipulation. Notably, uOCF demonstrates zero-shot generalization to unseen objects from a single real image.
## Updates
- 02/05/2024: All code, data, and models are released.
## Installation
Please run `conda env create -f environment.yml` to install the dependencies.
## Datasets
We gathered three datasets (Room-Texture, Kitchen-Matte, Kitchen-Shiny) for evaluating uOCF. The datasets are available at [link (Google Drive)](https://drive.google.com/drive/folders/1v_lZhiI32rvKjUDQVb5B7KHMpNLgQ2P_?usp=drive_link).
### Dataset organization
Each file begins with the prefix `{id:05d}_sc{scene_id:04d}_az{az_id:02d}`, and suffix includes `.png` for the image file, `_RT.txt` for the camera pose, and `_intrinsics.txt` for the camera intrinsics. The focal length and principal point are normalized, i.e., $f'_x = f_x / W, f'_y = f_y / H, c'_x = c_x * 2 / W - 1, c'_y = c_y * 2 / H - 1$, where $H$ and $W$ are the height and width of the image, respectively.
When running the scripts, please specify the path to the dataset by modifying the DATAROOT on the first line.
## Pretrained Models
We provide the pretrained models for uOCF. The models are available at [link (Google Drive)](https://drive.google.com/drive/folders/1zg-uSyFYCFWui3zyO6XXmkh8wlq5ht0Y?usp=drive_link).
## Testing
To test the pretrained model, please run the following command:
```
bash scripts/DATASET-NAME/test-MODE.sh
```
where DATASET-NAME is one of (Room-Texture, Kitchen-Matte, Kitchen-Shiny), and MODE is one of (plane, noplane).
## Training
(Optional, we have provided pre-trained checkpoints) Run the following command to train the model from stage 1
```
bash scripts/room-texture/train-stage1-MODE.sh
```
where MODE is one of (plane, noplane).
Note that sometimes it yields undisired results (e.g., either the foreground or the background is totally black). If this happens after training for 1 epoch (~1000 iterations), you may stop the training and re-run the command.
Then run the following command to train the model from stage 2
```
bash scripts/DATASET-NAME/train-stage2-MODE.sh
```
where DATASET-NAME is one of (Room-Texture, Kitchen-Matte, Kitchen-Shiny), and MODE is one of (plane, noplane).
## Citation
If you find this work useful in your research, please consider citing:
```
@article{uOCF,
title={Unsupervised Discovery of Object-Centric Neural Fields},
author={Luo, Rundong and Yu, Hong-Xing and Wu, Jiajun},
journal={arXiv preprint arXiv:},
year={2024}
}
```
## Acknowledgement
Our code framework is adapted from [uOCF](https://github.com/KovenYu/uORF). If you find any problem, please feel free to open an issue or contact the Rundong Luo at [rundongluo2002@gmail.com](mailto:rundongluo2002@gmail.com).
近期下载者:
相关文件:
收藏者: